はやぶさ2探査機は、宇宙空間でじっとしているのではなく、さまざまな外力を受けて運動しています。これらの外力による加速度を時々刻々見積もり、観測値とできるだけ矛盾のないように探査機の軌道を推定する方法を力学的な軌道決定といいます。
Matsumoto et al.(2020)では、レーザー高度計LIDARで計測された測距値を小惑星リュウグウ表面の地形に沿うように当てはめて、リュウグウに対するはやぶさ2探査機の軌道を改良しましたが(過去よみもの記事参照)、本研究では、この幾何学的に決められた探査機軌道を、LIDARレーザー高度計から得られる測距データとONC-W1カメラから得られるイメージトラッキングデータを用いた力学的な軌道決定によって改良しました。
LIDARは、はやぶさ2-リュウグウ表面間の距離をレーザーを使って精密に測定します。計測から得られた測距値はLIDARの視線方向(レーザーの照射方向)の1方向(図1のz方向)のみに対して感度があります。
一方、イメージトラッキングデータは、ONC-W1カメラの撮像の画心座標を表すデータです。カメラによる撮影では、リュウグウ表面の太陽に照らされている部分が白く(明るく)、影になっている部分や宇宙空間は黒く(暗く)写ります。明るい部分の座標の平均値が画心(輝度中心)座標であり、これにより、はやぶさ2のONC-W1カメラが宇宙空間においてどちらの方向を向いているかがわかります。このデータはLIDAR測距値と直交する2方向に対して感度があります(図1のx方向とy方向)。撮像データは1枚あたりのデータ量が多く、探査機から地上に送ることができるデータ量の制約から、限られた時刻でしか利用できません。一方、イメージトラッキングデータはデータ量が少ないため、より多くの時刻で利用可能であるという利点があります。
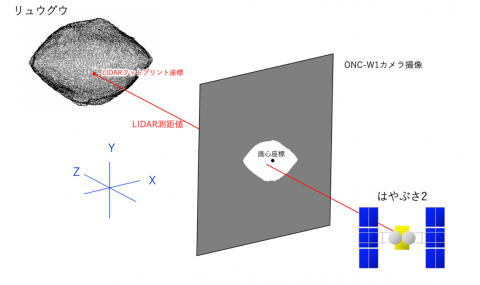
測距データとイメージトラッキングデータを用いることで、3次元空間における探査機の初期位置と速度を推定しました。LIDAR測距値を用いた探査機の位置の推定には、LIDARから出たレーザービームがリュウグウ表面に当たる位置(フットプリント)の中心座標が必要ですが、このフットプリントの推定には、先に述べたMatsumoto et al. (2020)による測距データの地形への当てはめの方法が利用されました。
力学的な軌道決定において精度の高い軌道を得るためには、軌道計算で使われる加速度のモデルの精度を良くすることも重要です。リュウグウ近傍では、リュウグウによる重力加速度、太陽輻射圧(太陽光が探査機を押す力)による加速度が、はやぶさ2探査機の軌道に大きな影響をおよぼします。これらの加速度の計算に使われるパラメータを改良することで、軌道決定の精度を向上させることができます。本研究では、軌道推定の過程において、リュウグウのGM(万有引力定数とリュウグウの質量の積)の値および太陽輻射圧モデルの補正係数(計算に使用しているモデルを何倍すれば良いかという補正値)も同時に推定されました。推定されたリュウグウのGM値は、29.8±0.3 m3/s2でした。この値は異なる方法、ソフトウェアで推定されたWatanabe et al. (2019)の結果と誤差の範囲内で一致しています。また、初期の太陽輻射圧モデルに対する補正係数は、1.13±0.16と推定されました。
測距値の地形の当てはめによって軌道を決定する方法では、形がよく似た別の場所の地形に測距値を当てはめてしまい、結果として不正確な軌道が推定されてしまう場合がありました。測距値に加えてイメージトラッキングデータ用い、力学的な軌道推定をすることによって、こうした間違った地形への当てはめを修正することができ、軌道の改良に役立ちました。測距値および画心座標値の観測値と計算値の差の平均値 (二乗平均平方根)は、それぞれ1.36 m、0.0270°でした。
本研究で用いた軌道決定の方法は、はやぶさ2ミッションだけでなく、将来の小天体のミッションに対しても、精密な軌道を得るための軌道決定方法の一つとして役立つことが期待されます。
本研究の成果は、Yamamoto et al., “Dynamic precise orbit determination of Hayabusa2 using laser altimeter (LIDAR) and image tracking data sets”として、2020年6月にEarth, Planets and Space誌にオンライン掲載されました。
参考文献
Matsumoto, K. et al. (2020) Improving Hayabusa2 trajectory by combining LIDAR data and a shape model. Icarus 338: 113574, doi: 10.1016/j.icarus.2019.113574
Watanabe, S. et al. (2019) Hayabusa2 arrives at the carbonaceous asteroid 162173 Ryugu—A spinning top–shaped rubble pile. Science 364:268-272. doi: 10.1126/science.aav8032