これは2021年1月に出版された学術論文の解説記事です。
レーザー高度計は惑星探査機に搭載される装置の一つです。機器から照射されたレーザー光が天体表面で反射されて探査機に戻ってくるまでの時間を測ることによって、探査機から天体表面までの距離を測定します。この論文では、小惑星探査機「はやぶさ2」のレーザー高度計(LIDAR)から照射されるレーザー光が探査機に対してどの方向を向いているのか、をカメラ画像と比較してこれまでよりも精度良く推定しました。レーザー高度計の正確な視野の方向がわかると、探査機の軌道をより正確に推定することができます(参考記事)
「自分で作った装置の方向がわからないの?」と思うかもしれません。打ち上げ前の試験で探査機に対する機器の取り付け角はもちろん測定するのですが、打ち上げの衝撃によって位置関係が変化する可能性があり、打ち上げ後に得られるデータを使って決め直す必要があるのです。
実は、打ち上げ1年後の2015年12月に探査機が地球スイングバイをした前後に、地球上のレーザー送信局から射出したレーザー光をLIDARで受光する「光リンク実験」の中で、探査機の姿勢を変化させてレーザーが受光できた方向から視野方向を推定していますが、得られたデータが少なかった事などから、小惑星での観測の際に再検討が必要と考えていました。なお、LIDARが受光できる角度(視野角)は0.1度よりも小さく、受光させるのにとても苦労しました。
さて、小惑星リュウグウには凸凹の地形がたくさんありましたので、カメラに写る岩とレーザー高度計の凸凹を比較すれば十分な精度でLIDARの視野方向が決められるだろうと考えました。図が一例です。
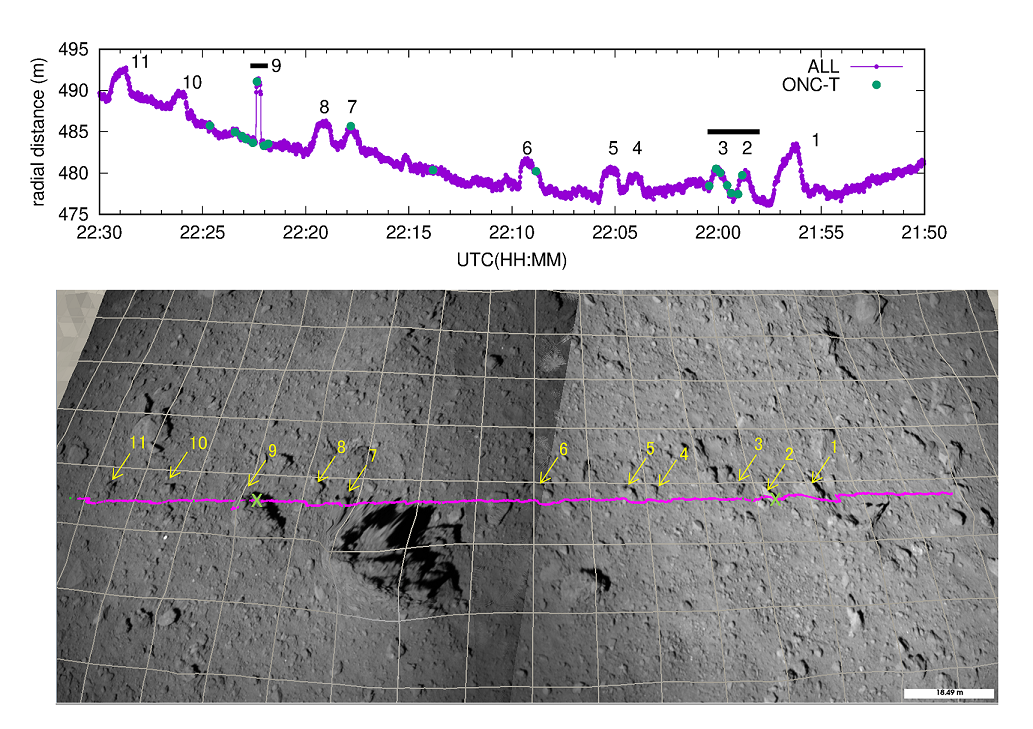
レーザー高度計で得られた地形図と画像データ(論文から引用)
画像の中の点群が予測されるレーザーの照射位置です。はやぶさ2は小惑星を周回せずに、上空のある範囲に滞在しますので、ほぼ点を観測するレーザー高度計では観測される領域は小惑星自転により横方向(経度方向)の一筋の線になります。論文では図の二か所に注目してカメラとレーザー高度計の相対位置を決めました。一か所は2つの岩が横並びになっているところ(岩番号2,3)、もう一か所は岩の一部をごく短時間LIDARがかすめたところ(岩番号9)です。横並びの一つ目からは横方向、かすめた二つ目からは縦方向のLIDARの視野方向を決めることができました。論文では、100枚以上のカメラ画像と比較して統計的に視野方向を決めることもしています。
最終的に決まったLIDARの視野方向の誤差推定は難しいのですが、上に書いた二か所の地形がLIDARで再現されるために画像上で許容できるずれ量から、縦横それぞれ数ピクセルと推定しました。視野方向の誤差を探査機位置の誤差に焼き直すと、例えば高度20 kmでは8.6 m となり、これがLIDAR視野方向の不確かさによる軌道誤差、という事になります。
レーザー高度計の視野を決める最も有効な方法は、レーザー光の波長に感度がある撮像カメラを搭載することですが、そうでない場合は、光リンク実験や今回のような画像との比較が有効です。例えば2024年に打ち上げ予定のMMX計画(火星の月であるフォボスを調査)等でも、今回と同じことが容易に実現可能だろうと考えています。
本論文は搭載装置の較正(キャリブレーション)を現地で得られたデータを用いて行ったもので、科学成果に直結するものではありませんが、このような地道な作業の積み上げで観測精度を高めているということがわかっていただければ幸いです。
この成果はNoda et al (2021), Alignment determination of the Hayabusa2 laser altimeter (LIDAR)として国際学術誌Earth, Planets, and Spaceに掲載されました。