フォボスは火星の衛星の一つです。地球は月という衛星を一つ持ちますが、火星にはフォボス、デイモス(ダイモス)という二つの衛星があります。まず、地球衛星の月と比較しながら火星衛星の特徴を見てみましょう。月の平均半径は約1,738 kmであるのに対し、フォボス・デイモスの平均半径はそれぞれ約11 km、6 kmです。月に比べて火星衛星はとても小さく、球から大きくずれた不規則な形をしています(図1)。月の軌道長半径は約384,000 kmですが、フォボス・デイモスの軌道長半径はそれぞれ約9,400 km、23,000 kmです。火星の半径は約3,400 kmですから、フォボスの高度は火星の上空約6,000 kmです。火星衛星は地球の月より惑星の近くを周回していることが分かります。平均密度は、月:約3,300 kg/m3、フォボス:約1,800 kg/m3、デイモス:約1,500 kg/m3です。フォボス・デイモスの平均密度は、地上で見つかったほとんどの隕石の密度より小さいです。月と異なり、火星衛星の内部には岩石の間にすき間(空隙)や水氷があるのではないかと考えられています(図2)。

図1:フォボスの疑似カラー画像 ©NASA
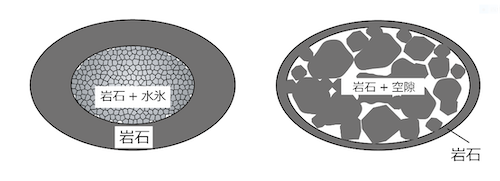
図2:想定される内部構造のイメージ
次に、フォボスの回転を見てみましょう。地球の月と同様に、フォボスは同期回転しており、同じ面を火星に向けています。フォボスの軌道は円から少しだけずれた楕円であり、ずれの度合いを表す離心率は0.015です。また、前述のようにフォボスは不規則な形を持っています。ここで「第1回 秤動とは何か」を振り返ると、衛星の公転軌道が楕円であり、形状や内部密度が自転軸に対して非対称であれば、経度方向の強制秤動が引き起こされます。すなわち、フォボスには経度秤動が存在し、自転速度が周期的に変化しています。経度秤動の振幅は公転軌道の離心率と慣性モーメントで決まります。離心率が大きいほど、火星から周期的に受ける重力トルク(フォボスの回転を変えようとする力)も大きくなります。そのトルクに対してフォボスがどのように応答して回転が変わるかは、物体の回しやすさ、回しにくさを表す慣性モーメントで決まります。慣性モーメントは物体内部の密度分布で決まります。すなわち、経度秤動を観測することにより、平均密度だけでは分からないフォボス内部の密度の偏りに関する情報が得られます。ただし、慣性モーメントには3つの成分(自転軸に沿ったZ軸周りとそれに直交するX、Y軸周り)が存在するので、経度秤動だけを観測してもこれら3成分を決めることはできません。そこで、内部密度分布を反映する重力場という別の情報と組み合わせます。具体的には、経度秤動の振幅に2次の重力場係数と呼ばれる係数のうち2つを追加すれば、慣性モーメントの3成分が計算できます。
これまでの観測結果はどうでしょうか?探査機がフォボスの近くを通過(フライバイ)する際に撮影された複数の画像から、経度秤動によるフォボス表面の動きを捉えた最近の研究[1]によると、経度秤動の振幅は約1.1度です。これは、フォボス表面が経度秤動によって約200 m動くことに相当します。また、その推定精度は約3%で良く決まっているように見えますが、他の研究[2]との差が約5%あり、実際の誤差はもう少し大きいかもしれません。フォボスの軌道の不確定性の影響も指摘されています。天体の重力場は、探査機がその天体に近づいた際の軌道追跡データから推定します。一般に、探査機が天体に近づくほど、またその状態が長く続くほど重力場の推定精度は上がります。しかし、これまでの結果は火星探査機Mars Express(図3)がフォボスを2回フライバイした際の追跡データに基づいており、最接近距離も59 kmとフォボス平均半径の5倍以上離れているのが現状です。2次の重力場係数の精度はまだ低く、30%を越える誤差を持つ係数もあります[3]。私たちは、フォボス質量の10%の水氷が表層付近または中心付近に偏在した状況を仮定し、これを検出するために3%の慣性モーメント精度が必要であること、また、この精度を達成するために経度秤動・2次の重力場係数を2~3%の精度で決める必要があることを示しました[4]。残念ながら、信頼できる慣性モーメントの値はまだ得られていないのが現状です。

図3:Mars Express ©ESA
この状況を変えると期待されているのが、JAXA主導で開発が進められている火星衛星探査計画(MMX)です(図4)。MMXはフォボス・デイモスをリモートセンシング観測し、フォボスに着陸して表面のサンプルを地球に持ち帰る予定です。MMX探査機はフォボスと少しだけ異なる軌道で火星を周回します。この時、フォボスから見ると探査機が自分の周りを回っているように見えます。逆にいえば、MMXはフォボスの全ての経度をくまなく観測することができます。これを擬周回軌道(QSO: Quasi-Satellite Orbit)と呼びます(図5)。ミッションが進むにしたがってQSOの高度を少しずつ下げてゆき、最も低いQSOでは約10 kmまでフォボスに近づきます。私たちはMMXに参加しており、QSO上から取得されるカメラ画像・レーザ高度計データおよび地上からの探査機追跡データを組み合わせることにより、経度秤動・2次の重力場係数を目標の2~3 %よりよい精度で決めることを目指します。実際のMMXの観測により、フォボス内部の密度分布が一様であるか否かを明らかにし、またフォボスがどのようにして生まれ、どのようにして進化した結果そのような密度分布に至ったのかを考えていきたいと思います(図6)。
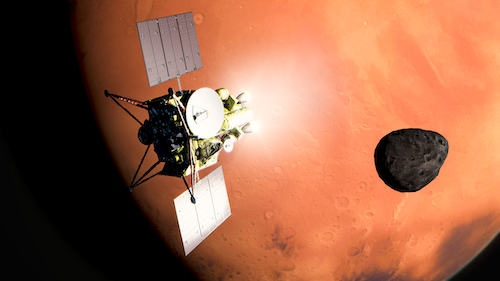
図4:MMX ©JAXA
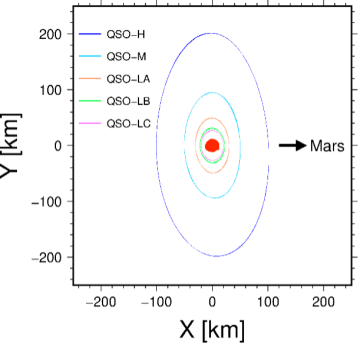
図5:擬周回軌道。中心の赤い部分がフォボス
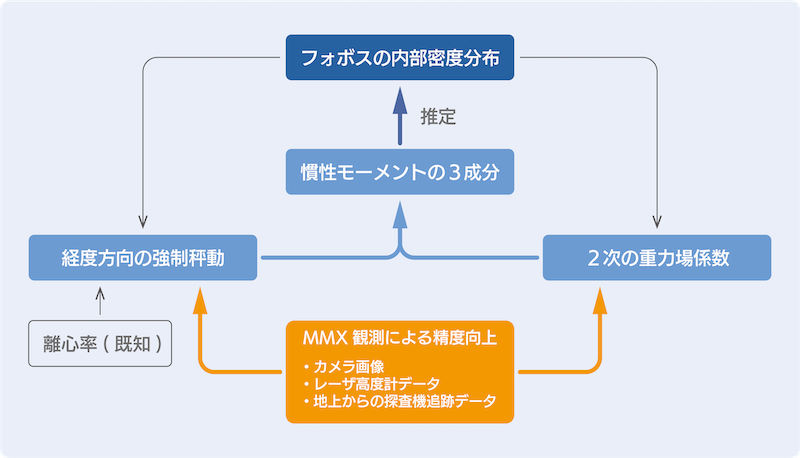
図6:解析の流れ
参考文献 [1] Burmeister S., Willner K., Schmidt V., Oberst J., Determination of Phobos’ rotational parameters by an inertial frame bundle block adjustment, J. Geod., 92, 963?973, 2018. [2] Lainey V., Pasewaldt A., Robert V., Rosenblatt P., Jaumann R., Oberst J., Roatsch T., Willner K., Ziese R., Thuillot W., Mars moon ephemerides after 14 years of Mars Express data, Astron. & Astrophys., 650, A64, 2021. [3] Yang X., Yan J., Andert T., Ye M., P?tzold M., Hahn M., Jin W., Li F., Barriot JP., The second-degree gravity coefficients of Phobos from two Mars Express flybys, Mon. Not. R. Astron. Soc., 490, 2007-2012, 2019. [4] Matsumoto K., Hirata N., Ikeda H., Kouyama T., Senshu H., Yamamoto K., Noda H., Miyamoto H., Araya A., Araki H., Kamata S., Baresi N., Namiki N., MMX geodesy investigations: science requirements and observation strategy, Earth Planets and Space, 73:226, 2021.
(文責:松本)