前回の記事では探査機の軌道推定が惑星の測地学と密接な関係にあり、軌道を決めることで惑星の内部構造の情報を得ることができるという説明をしました。理学的な「なぜ必要?」の答えとしてはだいたいそれで尽きているのですが、少し別の面からも説明してみます。
「多体問題」は解けない
高等学校の物理で最初に習う力学では、質点に働く力を数え上げると物体の加速度が決まり、初期条件の下で加速度を積分すれば速度と位置を順に求めることができました。シンプルな法則のみから物体の運動が綺麗に解ける事に感動した方もいらっしゃるのではないかと思います。あるいは運動量やエネルギーといった保存量を使うことによっても、速度や位置を時間の関数として求めなくても運動を解くことができました。これが可能なのは実は問題に関わる物体が2つ(例えば地球上でボールを投げる、など)で、それぞれの物体を重心に質量のある点(質点)とみなせたからです。
現実の天体や探査機ではどうでしょうか。探査機が飛行する太陽系には中心に太陽があり、木星、土星などの巨大惑星や、惑星のまわりの衛星(月)が存在します。このような環境の中を探査機が飛行すれば、色々な力を一身に受けるため解析的には運動は解けなくなります[1]。また、天体は質点ではなくて偏平な形であることや、天体を構成する物質が場所ごとに異なる事による追加の力や、小天体であれば太陽光により熱せられた面からの再輻射による力(Yarkovsky効果、YORP効果)なども加わります。さらに天体のサイズに比べてずっと小さい探査機には太陽光による圧力もじわじわと働いたりします。
従って、高校で習ったようなスパっ!とした答えは解析では求まらず、これから述べる観測量を定期的に取得して、物理モデルを作り、そのモデルを観測データに合わせこむような作業が必要になります。軌道推定はこのような作業のことを言います。
軌道推定の目的、観測量
そもそも探査機はある目的(ミッション)を達成するために地球の周りや他の天体に行くためのものです。「ある目的」は多岐にわたりますが、例えば地球周回軌道からカメラで災害の様子をとらえるとか、木星の氷衛星を周回して潮汐変形を調べて内部海の有無を調べるなどが具体例です。そのためには探査機を目的地まで運び、どこで観測しているのかを知る必要があります。これが軌道推定の最も自明な目的です。また、探査機を対象天体に投入すると探査機と天体の相対位置が良く求まるので、軌道推定により対象天体そのものの位置(あるいは「暦(れき)」とも言います)を地上からの位置天文観測よりも格段に良い精度で決めることができます。副次的にも見えますがこれが2つ目の目的、さらに初めて探査機が訪れる小天体等では緯度経度などの地理情報が定義されていませんので、天体表面の座標系を作るという点もあります。
このために必要な観測量と方法を簡単にまとめておきます。
①距離の時間変化(速度)
地上の電波送受信局から発せられて探査機で折り返された電波のドップラー周波数測定
②距離
地上の電波送受信局から探査機へのレンジング
探査機と天体の間でのレーザ測距
地上のレーザ送受光局から探査機へのレーザ測距(地球周回衛星の場合)
③角度
探査機で得られる画像上の岩塊などの特徴点同士の角度
探査機を天体の一つとみなした時の、地上電波受信局から見た探査機と電波星との角度(相対VLBI)
観測方法
上の①、②をどうやって得るのか?を説明します。観測量から位置と速度を求める軌道推定の部分は次回以降に譲ります。ほぼすべての探査機には地球上にある電波送受信局から送信される電波を受信・送信する機能があります。マイクロ波とよばれる周波数の電波(S帯、X帯、Ka帯など)が用いられ、装置としては探査機の外部にある送受信アンテナや、探査機内部には受信した電波を復調してコマンドなどの信号を取り出すとともに、受け取った電波に探査データを乗せて再度送信する中継器(トランスポンダー)などがあります。
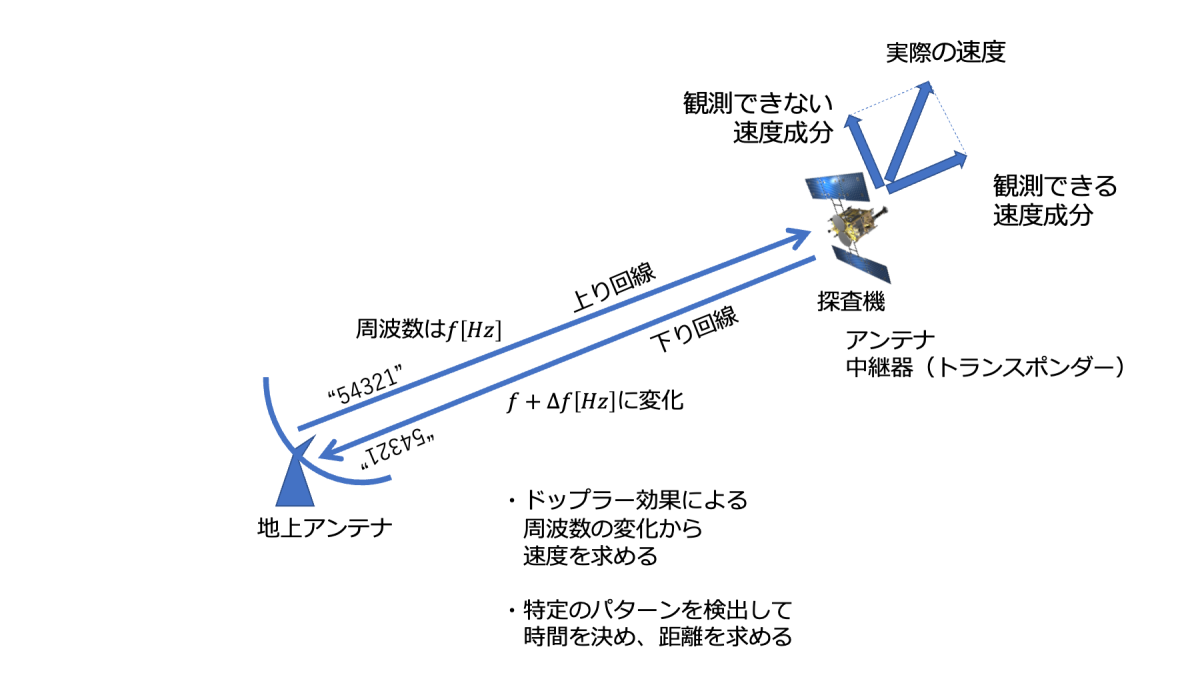
図:地上局―探査機間の電波回線の概要
速度(上述の①)はドップラー効果(救急車が近づいたり離れたりすると音が変わるあれです)から求められます。ドップラー効果のために周波数は地上で送信したものと受信したものでは異なりますので、地上局で周波数を測定して速度を求めます。地上との通信が確立している間はドップラーデータが取れていることになりますので、これが軌道推定のための最も重要なデータとなります。
地上局から距離を測定する場合(上述の②)は、電波に距離測定用の信号を乗せて(レンジ変調)地上で送受信し、その変調パターンを地上局で特定することによって送信から受信までの時間を測って決めます。信号に例えば“54321”のようなパターンを乗せておいて、その“54321”が戻って来るまでの時間を測る感じです。これはレンジングと呼ばれることもあります。ドップラー観測だけでもある程度の軌道推定はできるため、レンジングの頻度は低めの事が多いです。また、レーザ距離計など、探査機に天体までの距離を測定する装置が搭載されている場合は、この距離も軌道推定に使えるため、推定精度が格段に上がります。
このようにして地上局から探査機の向き(視線方向)の速度や位置が得られます。また、精度を上げるために、視線方向と垂直な方向に感度のある相対VLBI観測[2]が行われることもあります(上述の③)。
最後に、地球周回衛星で行われる「衛星レーザ測距」について説明します(上述の②)。これは文字通り地上からレーザ光を照射して、衛星に載っている逆反射板で反射された光を一粒一粒、光子として地上で受光し、送光から受光までの時間を測って測距をする技術です。英語の頭文字を取ってSLR(Satellite Laser Ranging)と呼ばれることもあります。電波とは異なり、距離だけを測定しますがその精度は電波よりもずっと高く、㎝以下の精度が実現できています[3]。SLRでは従来口径1 mクラスのレーザ送受信望遠鏡が必要とされてきましたが、最近では口径数十cmの小型望遠鏡で測距を行う試みもなされてきています。
関連して、今から約50年前のアポロ計画(米国)とルナ計画(旧ソ連)で月面に設置された逆反射板へのレーザ測距はSLRと同様の略語としてLLR(Lunar Laser Ranging)と呼ばれ、1970年代から今に至るまで行われており、月の軌道や潮汐、自転変動の推定に貢献しています。今後活発になるであろう月面への着陸ミッションでも、新たな逆反射板の搭載が検討されることでしょう。
[1]関係する天体が3つの場合は、限られた条件では運動を解析的に解くことができます。ラグランジュ点で有名な「円制限三体問題」、気になる方はチェックしてみてください。
[2]VLBI(Very Long Baseline Interferometry、超長基線電波干渉計)は天球での天体位置を推定する電波天文学の手法で、日本では国立天文台のVERA(VLBI Exploration for Radio Astronomy)などが有名です。相対VLBIでは電波星と探査機の見かけの角度を測定して、探査機の視線に垂直な方向の運動を制約します。
[3]例えば測地学テキストのSLRの項目参照。
(文責:野田 寛大)