前回の記事では、軌道推定の応用例として、探査機の軌道の様子から探査対象の天体の性質を解明する取り組みを紹介しました。これに加えて、探査機の居場所を知るための軌道推定は、探査機が様々なミッションを行う上で欠かせません。今回の記事では、軌道推定が宇宙探査をどのように支えているかについて、はやぶさ2を例にして取り上げたいと思います。
航行中の軌道推定
地図やGPSアプリで現在位置を確認しながら目的地まで歩くのと同じように、探査機を目標天体に到達させるためには、探査機の位置を常に把握しておく必要があります。地球から遠く離れる探査機は、地球を回るGPSなどの測位衛星の信号を使うことができません。では、目印のない宇宙空間で探査機の軌道をどのように推定するかというと、探査機と地上局とで電波のやり取りをします。電波の往復にかかる時間から探査機と地上局の間の距離が分かり、電波の周波数変化から探査機の速度情報が得られます。これに加えて、はやぶさ2では、国内の探査機としては初めて、VLBI計測を利用したDelta-DORと呼ばれる手法を軌道推定に用いました[1]。これらの観測の詳しい原理については、第2回の連載記事で紹介しています。
このように推定した軌道情報を基に、はやぶさ2はイオンエンジンによる軌道修正を行いながら、2018年6月に小惑星リュウグウに到着しました。また、2020年12月には、リュウグウで採取した物質が入ったカプセルを、オーストラリアのウーメラ砂漠に届けました。目標エリア内にカプセルを着陸させるには、ある決められた方向から、0.2度の精度で大気圏に突入させる必要がありました[2]。高精度の軌道推定は、このような高難度ミッションの成功に一役買っています。
リュウグウでの軌道推定
目標天体に到着した後に様々な運用を行う際も、必ず探査機の軌道推定を行います。例えば、はやぶさ2の着陸運用では、高度20 kmから降下を開始して、リュウグウに対する位置の推定と修正を繰り返して、目標地点に少しずつ近づきました(図1)。

図1:はやぶさ2の着陸運用における軌道推定[3]
高度が比較的高いところでは、約10分に1回、カメラでリュウグウを観測しては画像を地球に送信しました。地上のオペレーターが、画像にうつるリュウグウの地形をリュウグウの3Dモデルと照合することで、探査機がどこから撮像したのかを把握できます。この画像に基づく位置情報と、レーザー高度計による地表までの距離情報を組み合わせて、時々刻々変化する探査機の位置を推定したのです。このやり方は、確実に軌道を推定できる反面、処理に時間がかかってしまう欠点があります。探査機から地上への画像送信と、地上から探査機への指令送信には、光速で伝わる電波をもってしても往復で40分ほどかかります(第1回目の着陸日の場合)。探査機の高度が低い場合、この遅延の間に、探査機が小惑星表面に墜落してしまうリスクがありました。
そのため、はやぶさ2には、小惑星表面の近くでは自分で自分の軌道を推定できる機能が備わっていました。この自律的な軌道推定には、事前に小惑星へ投下しておいたターゲットマーカーと呼ばれる人工的な球状の目印を使います。ターゲットマーカーをカメラで捕捉しつつ、レーザーによる地表までの距離計測も行うことで、目標の着陸点からどの程度ずれた位置にいるかが分かる仕組みです(図2)。地上での処理に頼らない軌道推定により、はやぶさ2は誤差わずか60 cmの高精度着陸を実現しました[4]。

図2:はやぶさ2着陸時の自律的な軌道推定に用いられたデータ。左図がターゲットマーカーを捉えた画像であり、右図が測距データ(遠距離用のLIDARと近距離用のLRF 4チャンネル)のプロットである。文献[4]の図に加筆。
「飛び道具」の軌道推定
はやぶさ2ミッションには、技術的にユニークな点が他にもあります。はやぶさ2は、分離可能な装置を数多く搭載していました。先ほど述べたターゲットマーカーに加え、MASCOTという着陸機、MINERVA-II1/2というローバー、人工クレーター生成のための衝突装置などです。これらの搭載物が分離後にどのように飛行したかを明らかにすることも、軌道推定の役割です。例えば、分離後のターゲットマーカーが落下してから、地面でバウンドして静止するまでの挙動は、はやぶさ2のカメラ画像に写ったターゲットマーカーとその影から推定されました[5]。また、衝突装置による人工クレーター生成の様子は、はやぶさ2の分離カメラ(DCAM3)で観測されました。この観測時に捉えたリュウグウの地形から、重さわずか580 gの分離カメラ自身の軌道を推定することにも成功しています(図3)[6]。軌道推定を通じて、これらのような「飛び道具」を最大限に活かした探査が展開できるというわけです。
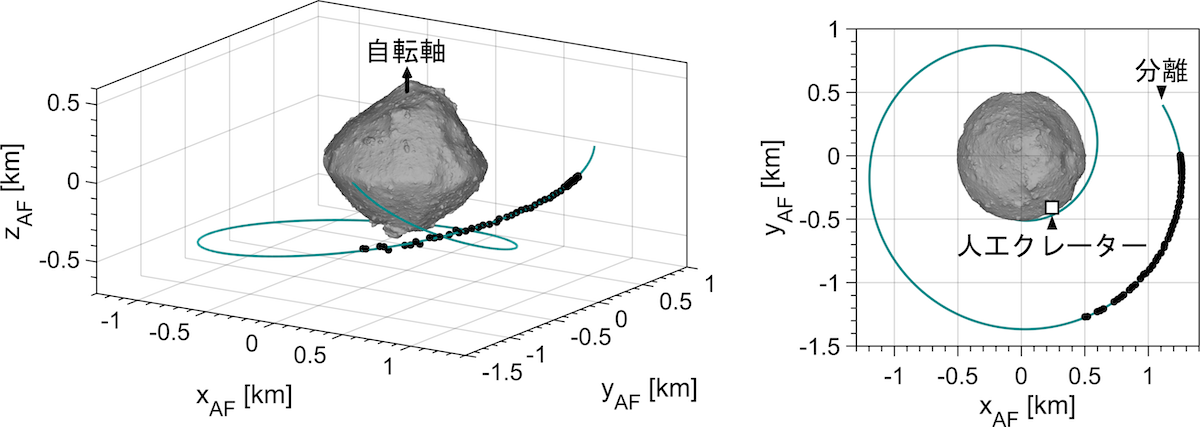
図3:はやぶさ2分離カメラの分離から着陸に至るまでの推定軌道。点群は画像から推定された撮像時のカメラ位置を表し、曲線はそれらの点群から求めた最も確からしい軌道を表す。文献[6]の図に加筆。
軌道推定のさらなる進化
2026年には、火星の衛星フォボスからの物質採取を目指すMMX探査機が国内で打ち上げられる予定です。このミッションでは、擬周回軌道と呼ばれる特殊な軌道で火星衛星を探査します。この軌道上から狙った地点を観測したり、探査機の安全性を保証したりする上で、軌道推定は不可欠です。また、MMXの着陸では、ターゲットマーカーを使わずに、カメラ画像を用いた地形照合による自律的な軌道推定も実施予定です。さらに、2030年代前半での国内からの打ち上げを目指して、彗星をターゲットとする次世代小天体サンプルリターン探査が計画されています。このミッション最大の特徴が、地球と目標彗星との往復を担う往還機と、彗星での物質採取を担う着陸機の2機構成という点です。彗星に到着した後は、これら2機の独立運用やドッキングを行う予定であり、より複雑な軌道推定が要求されます。ミッションの高度化に伴って、縁の下の力持ちである軌道推定も必然的に進化していく点が興味深いですね。
[1] 竹内央、「宇宙科学最前線:Delta-DOR 技術による深宇宙軌道決定の高精度化」、ISASニュース 2016年4月号
https://www.isas.jaxa.jp/outreach/isas_news/files/ISASnews421.pdf
[2] 小惑星探査機「はやぶさ2」記者説明会資料(2020/11/30)
https://www.hayabusa2.jaxa.jp/enjoy/material/press/Hayabusa2_Press_20201130_ver8.pdf
[3] G. Ono et al., "GNC strategies and flight results of Hayabusa2 first touchdown operation," Acta Astronautica, 174, 131-147, 2020.
https://doi.org/10.1016/j.actaastro.2020.04.029
[4] S. Kikuchi et al., “Hayabusa2 pinpoint touchdown near the artificial crater on Ryugu: Trajectory design and guidance performance,” Advances in Space Research, 68(8), 3093–3140, 2021.
https://doi.org/10.1016/j.asr.2021.07.031
[5] S. Kikuchi et al., “Ballistic Deployment of the Hayabusa2 Artificial Landmarks in the Microgravity Environment of Ryugu,” Icarus, 358, 114220, 2021.
https://doi.org/10.1016/j.icarus.2020.114220
[6] S. Kikuchi et al., “Simultaneous geometric calibration and orbit-attitude determination of Hayabusa2’s deployable camera (DCAM3),” Advances in Space Research, 74(2), 899–936, 2024.
https://doi.org/10.1016/j.asr.2024.04.057
(文責:菊地 翔太)